Airfoil
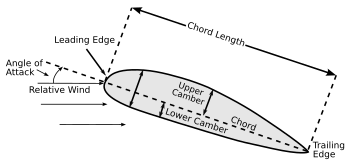
Components of the airfoil.
An airfoil (in American English) or aerofoil (in British English) is the shape of a Wing or blade (of a propeller, rotor or turbine) or sail as seen in cross-section.
An airfoil-shaped body moved through a fluid produces a force perpendicular to the motion called lift. Subsonic flight airfoils have a characteristic shape with a rounded leading edge, followed by a sharp trailing edge, often with asymmetric camber. Foils of similar function designed with water as the working fluid are called hydrofoils.
| Contents - Introduction
- Airfoil Terminology
- Thin Airfoil Theory
- Derivation Of Thin Airfoil Theory
|
INTRODUCTION
A fixed-wing aircraft's wings, horizontal, and vertical stabilizers are built with airfoil-shaped cross sections, as are helicopter rotor blades. Airfoils are also found in propellers, fans, Compressors and turbines. Sails are also airfoils, and the underwater surfaces of sailboats, such as the centerboard and keel, are similar in cross-section and operate on the same principles as airfoils. Swimming and flying creatures and even many plants and sessile organisms employ airfoils; common examples being bird wings, the bodies of fishes, and the shape of sand dollars. An airfoil-shaped wing can create downforce on an automobile or other motor vehicle, improving traction.
Any object with an angle of attack in a moving fluid, such as a flat plate, a building, or the deck of a bridge, will generate an aerodynamic force (called lift) perpendicular to the flow. Airfoils are more efficient lifting shapes, able to generate more lift (up to a point), and to generate lift with less drag.

Lift and Drag curves for a typical airfoil
A lift and drag curve obtained in wind tunnel testing is shown on the right. The curve represents an airfoil with a positive camber so some lift is produced at zero angle of attack. With increased angle of attack, lift increases in a roughly linear relation, called the slope of the lift curve. At about eighteen degrees this airfoil stalls and lift falls off quickly beyond that. Drag is least at a slight negative angle for this particular airfoil, and increases rapidly with higher angles. Airfoil design is a major facet of aerodynamics. Various airfoils serve different flight regimes. Asymmetric airfoils can generate lift at zero angle of attack, while a symmetric airfoil may better suit frequent inverted flight as in an aerobatic aeroplane. In the region of the ailerons and near a wingtip a symmetric airfoil can be used to increase the range of angle of attacks to avoid spin-stall. Ailerons itself are not cut into the airfoil, but extend it. Thus a large range of angles can be used without Boundary layer separation. Subsonic airfoils have a round leading edge, which is naturally insensitive to the angle of attack. For intermediate Reynold's number already before maximum thickness Boundary layer separation occurs for a circular shape, thus the curvature is reduced going from front to back and the typical wing shape is retrieved. Supersonic airfoils are much more angular in shape and can have a very sharp leading edge, which — as explained in the last sentence — is very sensitive to angle of attack. A supercritical airfoil has its maximum thickness close to the leading edge to have a lot of length to slowly shock the supersonic flow back to subsonic speeds. Generally such transonic airfoils and also the supersonic airfoils have a low camber to reduce drag divergence. Movable high-lift devices, flaps and sometimes slats, are fitted to airfoils on almost every aircraft. A trailing edge flap acts similar to an aileron, with the difference that it can be retracted partially into the wing if not used (and some flaps even make the plane a if used). A laminar flow wing has a maximum thickness in the middle camber line. Analysing the Navier-Stokes equations in the linear regime shows that a negative pressure gradient along the flow has the same effect as reducing the speed. So with the maximum camber in the middle, maintaining a laminar flow over a larger percentage of the wing at a higher cruising speed is possible. However, with rain or insects on the wing or for jetliner speeds this does not work. Since such a wing stalls more easily, this airfoil is not used on wingtips (spin-stall again).
Schemes have been devised to describe airfoils — an example is the NACA systems. Various ad-hoc naming systems are also used. An example of a general purpose airfoil that finds wide application, and predates the NACA system, is the Clark-Y. Today, airfoils are designed for specific functions using inverse design programs such as PROFOIL, XFOIL and AeroFoil. X-foil is an online program created by Mark Drela that will design and analyze subsonic isolated airfoils. Modern aircraft wings may have different airfoil sections along the wing span, each one optimized for the conditions in each section of the wing.

An airfoil designed for
winglets (PSU 90-125WL)
AIRFOIL TERMINOLOGY
The various terms related to airfoils are defined below:
- The mean camber line is a line drawn midway between the upper and lower surfaces.
- The chord line is a straight line connecting the leading and trailing edges of the airfoil, at the ends of the mean camber line.
- The chord is the length of the chord line and is the characteristic dimension of the airfoil section.
- The maximum thickness and the location of maximum thickness are expressed as a percentage of the chord.
- For symmetrical airfoils both mean camber line and chord line pass from centre of gravity of the airfoil and they touch at leading and trailing edge of the airfoil.
- The aerodynamic center is the chord wise length about which the pitching moment is independent of the lift coefficient and the angle of attack.
- The center of pressure is the chord wise location about which the pitching moment is zero.

An airfoil section is displayed at the tip of this Denney Kitfox aircraft, built in 1991.

From top to bottom:
- laminar flow airfoil for a RC park flyer;
- laminar flow airfoil for a RC pylon racer;
- laminar flow airfoil for a manned propeller aircraft;
- laminar flow at a jet airliner airfoil;
- stable airfoil used for flying wings;
- aft loaded airfoil allowing for a large main spar and late stall;
- transonic supercritical airfoil;
- supersonic leading edge airfoil.
Colours:
Black = laminar flow,
red = turbulent flow,
grey = subsonic stream,
blue = supersonic flow volume
THIN AIRFOIL THEORY
Thin airfoil theory is a simple theory of airfoils that relates angle of attack to lift. It was devised by German mathematician Max Munk and further refined by British aerodynamicist Hermann Glauert and others in the 1920s. The theory idealizes the flow around an airfoil as two-dimensional flow around a thin airfoil. It can be imagined as addressing an airfoil of zero thickness and infinite wingspan.
Thin airfoil theory was particularly notable in its day because it provided a sound theoretical basis for the following important properties of airfoils in two-dimensional flow:
(1) on a symmetric airfoil, the center of pressure lies exactly one quarter of the chord behind the leading edge
(2) on a Cambered airfoil, the aerodynamic Center lies exactly one quarter of the chord behind the leading edge
(3) the slope of the lift coefficient versus angle of attack line is  units per radian
units per radian
As a consequence of (3), the section lift coefficient of a symmetric airfoil of infinite wingspan is:

- where
 is the section lift coefficient,
is the section lift coefficient,
 is the angle of attack in radians, measured relative to the chord line.
is the angle of attack in radians, measured relative to the chord line.
(The above expression is also applicable to a cambered airfoil where is the angle of attack measured relative to the zero-lift line instead of the chord line.)
Also as a consequence of (3), the section lift coefficient of a cambered airfoil of infinite wingspan is:

- where
 is the section lift coefficient when the angle of attack is zero.
is the section lift coefficient when the angle of attack is zero.
Thin airfoil theory does not account for the stall of the airfoil which usually occurs at an angle of attack between 10° and 15° for typical airfoils.
DERIVATION OF THIN AIRFOIL THEORY
The airfoil is modeled as a thin lifting mean-line (camber line). The mean-line, y(x), is considered to produce a distribution of vorticity γ(s) along the line, s. By the Kutta condition, the vorticity is zero at the trailing edge. Since the airfoil is thin, x (chord position) can be used instead of s, and all angles can be approximated as small.
From the Biot-Savart law, this vorticity produces a flow field w(s) where

where x is the location at which induced velocity is produced, x' is the location of the vortex element producing the velocity and c is the chord length of the airfoil.
Since there is no flow normal to the curved surface of the airfoil, w(x) balances that from the component of main flow V which is locally normal to the plate — the main flow is locally inclined to the plate by an angle α − dy / dx. That is

This integral equation can by solved for γ(x), after replacing x by
 ,
,
as a Fourier series in Ansin(nθ) with a modified lead term A0(1 + cos(θ)) / sin(θ)
That is 
(These terms are known as the Glauret integral).
The coefficients are given by 
and 
By the Kutta-Joukowski theorem, the total lift force F is proportional to

and its moment M about the leading edge to 
The calculated Lift coefficient depends only on the first two terms of the Fourier series, as

The moment M about the leading edge depends only on A0,A1 and A2 , as

The moment about the 1/4 chord point will thus be,
 .
.
From this it follows that the center of pressure is aft of the 'quarter-chord' point 0.25 c, by

The aerodynamic center, AC, is at the quarter-chord point. The AC is where the pitching moment M' does not vary with angle of attack, i.e.

This post was posted by Pradeep.M.K, III year, Aeronautical Engineering, Hindusthan Institute Of Technology




























{kind=link}